Cascade Heat Pump Design
Designed and optimized a two-stage (cascade) air-source heat pump to deliver 150 kW heating from 0°C outdoor air to a 25°C indoor setpoint.
Overview
- Thermal design project comparing a conventional single-stage vapor-compression heat pump against a two-loop cascade configuration for large temperature lift.
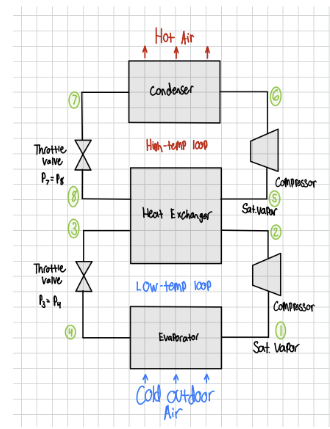
- Cascade architecture couples low- and high-temperature loops via an intermediate heat exchanger to reduce compressor work and improve COP.
My role
- Owned the core calculations and parametric study; generated performance graphs and summarized results for the final report.
- Evaluated operating point trade-offs and identified the intermediate pressure that maximizes COP while meeting the 150 kW load.
Tech
- Thermodynamic modeling using refrigerant property tables + energy balances across compressors, heat exchangers, and throttling devices (idealized assumptions per spec).
- Parametric sweep of intermediate pressure (3.2–6 bar) to balance compressor workloads and minimize total power.
- Compared cascade vs single-loop: optimized cascade COP ≈ 8.61 vs single-loop COP ≈ 7.37.
Impact
- Identified optimal intermediate pressure near 5 bar (max COP ≈ 8.61; total compressor power ≈ 17.43 kW for the 150 kW heating requirement).
- Projected energy savings vs single-stage: ~2927 kWh/week (cascade) vs ~3240 kWh/week (single-loop) at constant load.
- Economic analysis showed payback of the higher upfront cascade cost in ~3.1 years and materially lower lifetime cost (e.g., ~$85k lower over 20 years).